
The UKMARSBOT is very similar in concept to the robots I used to build for the IET and Techfest events around five years ago, so when I discovered the UKMARS website last year I decided to re-join the hobby and build one. The majority of Hammerhead’s chassis is standard UKMARSBOT, using Pololu 6v HP 30:1 micro metal gear motors, with 10:1 motors up my sleeve if I need more speed. However I wanted to use my old power supply and line sensor designs so I made one or two modifications.
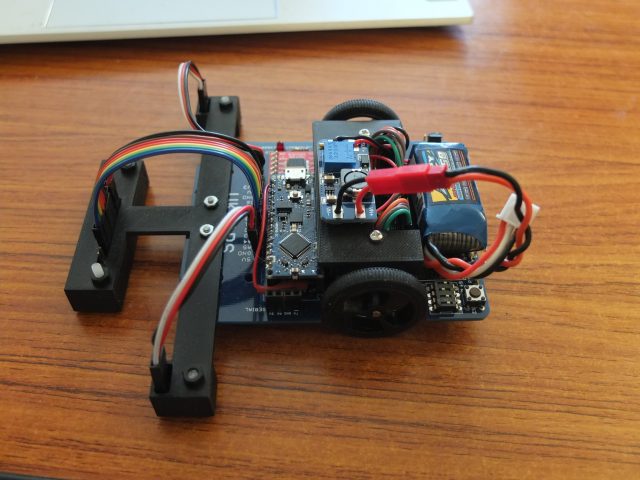
The battery is a 2-cell 350 mAh Lithium Polymer (LiPo) battery with a variable output 2A regulated power supply board stepping it up to 9v. The stable output voltage makes for consistent motor performance as the battery discharges, and I have the option to raise the output voltage as high as I dare for drag races. I stole Rob Probin’s Pi Zero mounting idea and fitted a 3D-printed platform for the regulator across the motor mounts. LiPo batteries are easily damaged if over-discharged, so I lifted one end of the standard battery monitoring resistor divider and ran a flying lead to the power regulator input to monitor the LiPo output instead of the Nano input voltage. Peter’s lovely pcb now looks somewhat less neat!
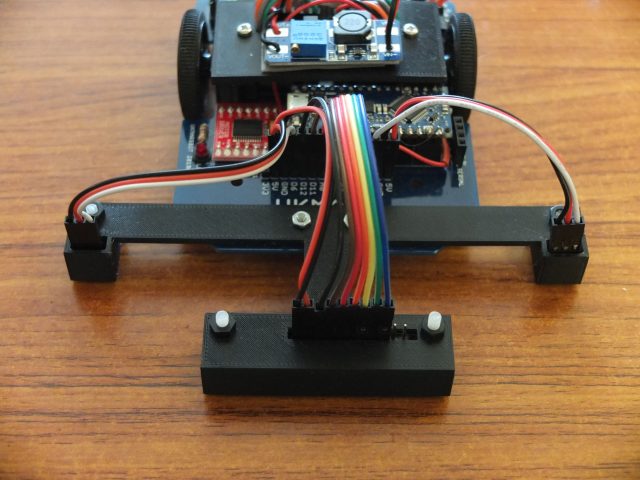
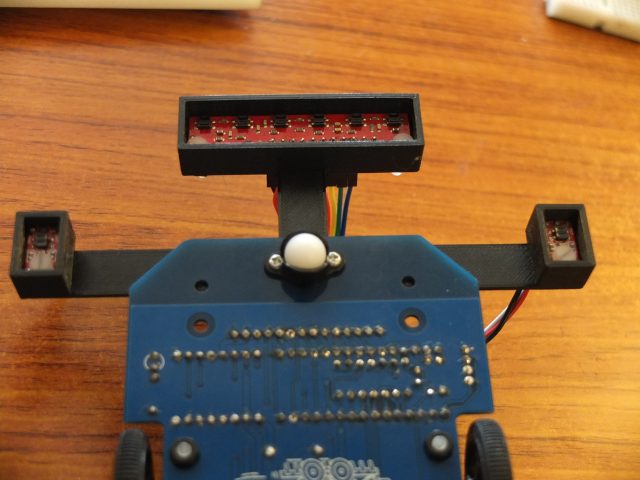
My old robots used Pololu’s QTR-RC reflectance sensors with some success so I wanted to fit them to Hammerhead. I replaced the standard line sensor PCB with a 3D-printed holder for a 6-sensor array at the front and a single sensor for each side marker. The clever QTR-RC sensors can give an analogue output using digital Arduino I/O pins and there are just enough spare pins on the Nano for this arrangement. I also used a small Pololu ball caster to support the front of the robot and a drawing pin at the rear to prevent the front sensors lifting too much under hard acceleration in a drag race.
The old robot software was written in C for the Pololu Baby Orangutan robot controller, which is in essence an Arduino Nano with integral dual motor driver and an excellent C library. I’m grappling with Visual Studio Code and PlatformIO to convert this for the Nano and I hope to have the robot running on my small practise track before too long. Why Hammerhead? Well I’ve never bothered naming my robots before but it seems to be the thing here, and this is the name which sprang to mind after looking at the front sensor array.