
This is the demonstration model of the UKMARSbot robot built for the robot club at KES School in the 2019/2020 academic year with students in year 8.
Motors are Poluloi N20s with a 10:1 gearbox and the extended shaft with magnetic encoders added The wheels are the standard 32 mm Polulo ones
Sensors are two 3mm red visual light of 3000mcd from Rapid at the front of the line sensor board, with one phototransistor between them to measure the returning light. A further 2 red LEDS and phototransistors are used as side marker detectors. Power is supplied by a USB rechargeable battery with a PP3 form factor.
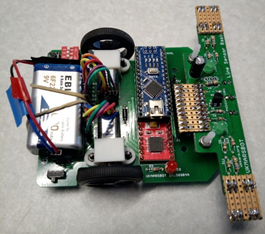
The standard build has been upgraded with Veroboard extended side marker detectors and the cable connection to the line sensor board has been replaced with a Veroboard based connector Both of these are visible in the picture as the copper-coloured parts.
The current version does not learn the track or use the corner markers to change its speed, but it is planned to implement this later. There is plenty of scope for improvement still in this build by this additional coding.
Due to Covid-19 we were unable to take this robot to the Micromouse competition in 2020, but we have managed to run it on the 2020 virtual competition track with a time of 19 seconds.