
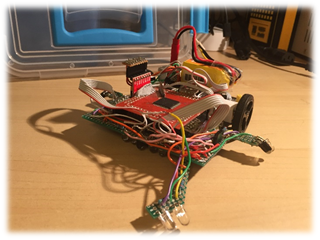
Asymouse is a beginner’s robot built by Ian Butterworth to complete the IET triathlon events. The platform is a PCB designed by the builder with sensor boards constructed from prototyping board. There is minimal surface mount, just a microSD slot, and the robot is built around a dsPic33 plug in processor board. Motors are Pololu HP N20s with magnetic encoders and in line follower configuration a 10:1 gearbox. The maze variant uses 30:1 gearboxes.
Sensors are infra-red and power supplied by a 3 cell LiPo battery.
The name derives from the fact that using the comparatively large processor plug in board, the motors cannot be mounted in the middle of the chassis. The front to back asymmetry means that the robot is front end heavy and without a substantial counterbalance weight at the rear under the battery, the front end would snag on uneven surfaces and joints in competition tracks. The result is a very heavy robot that needs the power provided by the 3 cell LiPo. The long arm at the front with a sensor pair provides early detection of radius markers when the robot is performing a “learnt” run to provide enough time for braking to be applied when entering turns from a straight.
Ian hopes to further develop Asymouse for the maze solving contest
See Asymouse complete the 2020 virtual line follower contest here: